-
Аж үйлдвэрийн роботуудын үндсэн найрлага
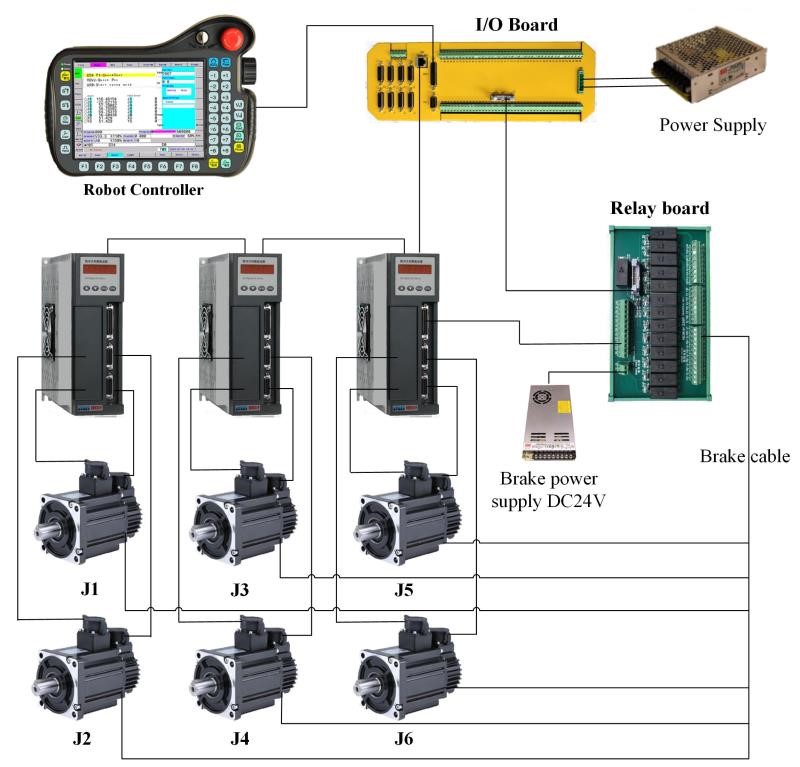
Архитектурын үүднээс роботыг гурван хэсэг, зургаан системд хувааж болох бөгөөд тэдгээрийн гурван хэсэг нь: механик хэсэг (янз бүрийн үйлдлийг хэрэгжүүлэхэд ашигладаг), мэдрэх хэсэг (дотоод болон гадаад мэдээллийг хүлээн авахад ашигладаг), хяналтын хэсэг (төрөл бүрийн үйлдлийг гүйцэтгэхийн тулд роботыг удирдах ...Дэлгэрэнгүй уншина уу -
CNC боловсруулах төвийн програмчлалын ур чадварын стратеги
CNC боловсруулалтын хувьд програмчлал нь маш чухал бөгөөд энэ нь боловсруулалтын чанар, үр ашигт шууд нөлөөлдөг. Тэгэхээр CNC боловсруулах төвүүдийн програмчлалын ур чадварыг хэрхэн хурдан эзэмших вэ? Хамтдаа сурцгаая! Түр зогсоох тушаал, G04X(U)_/P_ нь багажийн түр зогсоох хугацааг хэлнэ (тэжээлийн зогсолт, булны ...Дэлгэрэнгүй уншина уу -

Хятад дахь CNC машин хэрэгслийн хөгжлийн чиг хандлагын техникийн долоон онцлох үйл явдал.
1-р тал: Нийлмэл машин хэрэгсэл нь дээшилж байна. Дээд зэрэглэлийн CNC машин хэрэгслийн хүчирхэг удирдлагын чадвар, улам боловсронгуй дизайн, үйлдвэрлэлийн технологи, програмчлал, нийлмэл машин хэрэгсэл зэрэг улам боловсронгуй хэрэглээний технологийн ачаар...Дэлгэрэнгүй уншина уу






